Interfaz SPI¶
SPI es una interfaz de comunicación serie rápida entre un controlador y dispositivos periféricos. Expansión: Serial Peripheral Interface.
SPI se usa frecuentemente donde los datos necesitan transmitirse más rápido que con I2C, o donde el dispositivo está diseñado para SPI: pantalla, tarjeta SD, módulo RFID, sensor, driver o chip de memoria.
Dónde se usa SPI¶
En impresoras 3D y dispositivos similares al iDryer, SPI puede aparecer en:
- Módulos RFID/NFC como el RC522;
- Pantallas OLED/TFT;
- Tarjetas SD;
- Acelerómetros para el compensador de resonancias;
- Drivers de motores paso a paso, por ejemplo TMC2130/TMC5160;
- Chips de memoria;
- Placas ADC/DAC y de expansión;
- Algunos sensores y módulos especializados.
SPI suele ser más rápido que I2C, pero requiere más cables y una selección de pines más cuidadosa.
Líneas básicas¶
Un SPI típico utiliza:
SCKoCLK- señal de reloj;MOSI- datos del controlador al dispositivo;MISO- datos del dispositivo al controlador;CS,SSoNSS- seleccionar dispositivo específico;GND- tierra común;- alimentación del módulo.
Diagrama con dos dispositivos:
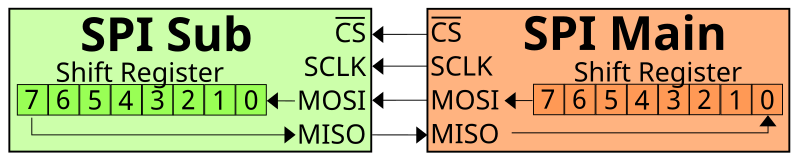
Fuente: Wikimedia Commons, Em3rgent0rdr, CC0 Public Domain
{kind=link}
SCK, MOSI y MISO pueden ser compartidos por varios dispositivos. Pero cada dispositivo generalmente necesita su propio CS.
CS en lugar de direcciones¶
En I2C, los dispositivos se distinguen por direcciones. En SPI, generalmente no hay direcciones. El controlador selecciona el dispositivo con una línea CS separada.
Ejemplo:
SCK -> common to all SPI devices
MOSI -> common
MISO -> common
CS1 -> RFID module
CS2 -> display
CS3 -> SD card
Cuando el controlador quiere comunicarse con el módulo RFID, activa CS1. Cuando quiere comunicarse con la pantalla, activa CS2.
Más comúnmente, CS es activo en bajo: en reposo la línea es HIGH, para seleccionar un dispositivo - LOW. Pero esto debe verificarse en la hoja de datos técnica.
MOSI/MISO y nuevos nombres¶
En esquemas antiguos y muy comunes, los nombres son:
MOSI- Master Out Slave In;MISO- Master In Slave Out;SS- Slave Select.
En documentación más reciente, puede ver nombres neutros:
PICO- Peripheral In Controller Out, equivalente a MOSI;POCI- Peripheral Out Controller In, equivalente a MISO;CS- Chip Select.
En la electrónica de impresoras 3D, MOSI, MISO, SCK, CS siguen siendo muy comunes. Lo más importante es entender la dirección de la señal y verificar el pinout del módulo específico.
MISO puede no ser necesario¶
No todos los dispositivos SPI envían datos de vuelta.
Por ejemplo, una pantalla simple puede recibir solo comandos y píxeles. Entonces la línea MISO puede estar ausente o sin usar.
Pero para dispositivos que leen datos, MISO es necesario:
- Módulo RFID;
- Tarjeta SD;
- Sensor;
- Driver con diagnósticos;
- Chip de memoria.
Si el módulo debe responder y MISO no está conectado o está invertido, la inicialización puede fallar.
Velocidad y modo SPI¶
SPI tiene una velocidad. Puede ser mucho mayor que I2C, pero eso no significa que deba configurarse al máximo de inmediato.
El funcionamiento se ve afectado por:
- longitud del cable;
- calidad de la tierra;
- el módulo y su hoja de datos;
- nivel de ruido;
- frecuencia del controlador;
- el modo SPI elegido.
El modo SPI se establece mediante los parámetros de polaridad de reloj y fase de reloj: CPOL y CPHA. El modo 0 se usa frecuentemente, pero no siempre. Si el modo es incorrecto, el dispositivo puede no responder o devolver datos incorrectos.
En la mayoría de las bibliotecas listas para usar, el modo ya está configurado. Pero si está conectando un módulo inusual o escribiendo una configuración de bajo nivel, debe verificar la hoja de datos.
3.3V y 5V¶
Al igual que otras interfaces, SPI no garantiza niveles de voltaje seguros.
ESP32, RP2040, STM32 y muchos módulos modernos operan con lógica de 3.3V. Arduino Uno/Nano frecuentemente usa 5V.
Antes de conectar, verifique:
- alimentación del módulo;
- nivel lógico de
SCK,MOSI,MISO,CS; - si hay adaptación de niveles;
- si el módulo tolera
5Ven las entradas de señal; - si la entrada del controlador tolera
5V.
Por ejemplo, el RC522 generalmente requiere alimentación y lógica de 3.3V. Conectarlo a un Arduino de 5V sin adaptación de niveles es mala idea.
SPI en Klipper¶
En Klipper, SPI se usa para varios dispositivos: drivers TMC, acelerómetros, algunas pantallas y sensores.
La configuración puede incluir:
cs_pin- pin de selección del dispositivo;spi_bus- bus SPI de hardware;spi_speed- velocidad en Hz;spi_software_sclk_pin;spi_software_mosi_pin;spi_software_miso_pin.
Si el dispositivo está conectado a un MCU adicional, los pines deben pertenecer a ese MCU. Como con otras secciones de Klipper, el pinout específico de la placa es más importante que las suposiciones.
Idea aproximada:
[some_spi_device]
cs_pin: chamber:gpio9
spi_software_sclk_pin: chamber:gpio10
spi_software_mosi_pin: chamber:gpio11
spi_software_miso_pin: chamber:gpio12
Esto no es una configuración lista para un dispositivo específico, sino una ilustración: todos los pines SPI deben estar en el MCU al que el módulo está realmente conectado.
Longitud del cable e interferencias¶
SPI puede funcionar rápido, pero no tolera cables largos y descuidados.
Reglas prácticas:
- mantenga
SCK,MOSI,MISO,CScortos; - trace cerca de
GND; - no trace en paralelo con cables de calefactor y motor;
- reduzca
spi_speedsi hay errores; - use conectores adecuados;
- no lleve SPI por toda la impresora sin motivo;
- para nodos remotos, elija con mayor frecuencia CAN, UART/RS-485 o un MCU separado cerca del módulo.
La línea SCK es especialmente sensible: es una señal de reloj. Si está contaminada, toda la comunicación puede volverse inestable.
SPI y RC522¶
El RC522 es un buen ejemplo de módulo SPI con confusión de nombres.
En muchas placas RC522, el pin SDA se usa en realidad como SS/CS para SPI. No es el SDA de I2C.
Para el RC522, generalmente necesita:
3.3V;GND;SCK;MOSI;MISO;SDA/SS/CS;RST;- a veces
IRQ, pero en proyectos simples frecuentemente no se usa.
Un diagrama detallado se encuentra en el artículo práctico: Conexión de un lector RFID.
Qué verificar antes de conectar¶
Antes de conectar un módulo SPI, verifique:
- alimentación del módulo;
- nivel lógico;
- pinout de la placa específica;
- dónde están
SCK,MOSI,MISO,CS; - si se necesitan
RST,DC,IRQu otros pines; - qué
CSestá asignado al dispositivo; - si
CSno conflictúa con otro módulo; - si se necesita SPI por hardware o SPI por software;
- qué velocidad recomienda la documentación;
- si el firmware soporta este módulo.
Errores típicos¶
- confundidos
MOSIyMISO; - olvidó
CS; - conectó dos dispositivos a un mismo
CS; - no conectó
GNDcomún; - aplicó
5Va un módulo SPI de3.3V; - confundió
SDAen el RC522 conSDAde I2C; - seleccionó velocidad demasiado alta;
- hizo los cables demasiado largos;
- conectó el módulo a un MCU pero especificó pines de otro;
- creer que SPI es una interfaz de potencia para alimentar cargas.
Conclusión clave¶
SPI es una interfaz rápida para módulos cercanos al controlador. Generalmente se necesitan SCK, MOSI, MISO, CS, alimentación y GND.
La principal diferencia con I2C: SPI generalmente no tiene direcciones, y cada dispositivo se selecciona mediante un CS separado. Antes de conectar, verifique el pinout, los niveles lógicos, la velocidad, la longitud del cable y el soporte del firmware.
Materiales relacionados¶
- SparkFun: Serial Peripheral Interface - explicación práctica de SPI, líneas de datos, nuevos nombres PICO/POCI y lógica de intercambio básica.
- SparkFun: SPI Chip Select - por qué se necesita
CSy cómo conectar varios dispositivos SPI. - Adafruit: SPI Devices - comparación SPI vs I2C,
CSseparado, velocidad, polaridad/fase y limitaciones. - DigiKey: SPI Simplifies Device Communication - opciones para conectar varios dispositivos SPI y el papel de
CS. - Klipper Configuration Reference: Common SPI settings - parámetros
spi_speed,spi_bus, SPI por software ycs_pinen Klipper.