SPI 介面¶
SPI 是控制器和周邊設備之間的快速串列通訊介面。展開:Serial Peripheral Interface(序列周邊介面)。
SPI 常用於需要比 I2C 更快速的資料傳輸,或設備本身就是為 SPI 設計的場景:顯示器、記憶卡、RFID 模組、感應器、驅動器或記憶體晶片。
SPI 的應用場景¶
在 3D 印表機和 iDryer 類設備中,SPI 可能出現在:
- RFID/NFC 模組,例如 RC522;
- OLED/TFT 顯示器;
- 記憶卡;
- 用於輸入整形的加速度感應器;
- 步進馬達驅動器,例如 TMC2130/TMC5160;
- 記憶體晶片;
- ADC/DAC 和擴展板;
- 某些感應器和專用模組。
SPI 通常比 I2C 更快,但需要更多線路和更仔細的腳位選擇。
基本信號線¶
典型的 SPI 使用:
SCK或CLK- 時鐘信號;MOSI- 控制器到設備的資料;MISO- 設備到控制器的資料;CS、SS或NSS- 選擇特定設備;GND- 共同接地;- 模組電源。
包含兩個設備的圖示:
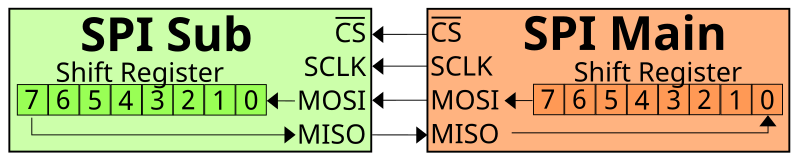
來源:Wikimedia Commons, Em3rgent0rdr, CC0 Public Domain
{kind=link}
SCK、MOSI 和 MISO 可由多個設備共用。但每個設備通常需要自己的 CS。
CS 代替位址¶
在 I2C 中,設備由位址區分。在 SPI 中,通常沒有位址。控制器透過單獨的 CS 線選擇設備。
範例:
當控制器想與 RFID 模組通訊時,它啟動 CS1。當它想與顯示器通訊時,它啟動 CS2。
最常見的情況是,CS 是低電位活躍的:閒置時線路為 HIGH,選擇設備時為 LOW。但這需要在技術資料表中驗證。
MOSI/MISO 和新名稱¶
在舊的和非常常見的配置中,名稱是:
MOSI- Master Out Slave In(主設備出,從設備入);MISO- Master In Slave Out(主設備入,從設備出);SS- Slave Select(從設備選擇)。
在較新的文件中,你可能會看到中立的名稱:
PICO- Peripheral In Controller Out(周邊入,控制器出,相當於 MOSI);POCI- Peripheral Out Controller In(周邊出,控制器入,相當於 MISO);CS- Chip Select(晶片選擇)。
在 3D 印表機電子設備中,MOSI、MISO、SCK、CS 仍然很常見。關鍵是要理解信號方向,並檢查特定模組的腳位圖。
MISO 可能不需要¶
並非每個 SPI 設備都實際傳回資料。
例如,簡單的顯示器可能只接收命令和像素。那麼 MISO 線可能缺失或未使用。
但對於需要讀取資料的設備,MISO 是必需的:
- RFID 模組;
- 記憶卡;
- 感應器;
- 具有診斷功能的驅動器;
- 記憶體晶片。
如果模組應該回應,但 MISO 未連接或接錯了,初始化可能會失敗。
SPI 速度和模式¶
SPI 有速度。它可以遠高於 I2C,但這不意味著你需要立即設定最高速度。
工作受到以下因素的影響:
- 線路長度;
- 接地品質;
- 模組及其資料表;
- 噪聲等級;
- 控制器頻率;
- 選擇的 SPI 模式。
SPI 模式由時鐘極性和時鐘相位參數設定:CPOL 和 CPHA。通常使用模式 0,但並非總是如此。如果模式不正確,設備可能無法回應或返回不正確的資料。
在大多數現成的程式庫中,模式已經設定好了。但如果你連接的是不尋常的模組或編寫低層配置,你需要檢查資料表。
3.3V 和 5V¶
與其他介面一樣,SPI 不能保證安全的電壓等級。
ESP32、RP2040、STM32 和許多現代模組使用 3.3V 邏輯。Arduino Uno/Nano 通常使用 5V。
連接前,驗證:
- 模組電源;
SCK、MOSI、MISO、CS的邏輯等級;- 是否有電壓匹配;
- 模組是否容許信號輸入上的
5V; - 控制器輸入是否容許
5V。
例如,RC522 通常需要 3.3V 電源和邏輯。在沒有電壓匹配的情況下將其連接到 5V Arduino 是個壞主意。
Klipper 中的 SPI¶
在 Klipper 中,SPI 用於各種設備:TMC 驅動器、加速度感應器、某些顯示器和感應器。
配置可能包括:
cs_pin- 設備選擇腳位;spi_bus- 硬體 SPI 匯流排;spi_speed- 速度(Hz);spi_software_sclk_pin;spi_software_mosi_pin;spi_software_miso_pin。
如果設備連接到額外的 MCU,腳位應屬於該 MCU。與其他 Klipper 部分一樣,特定主板的腳位圖比猜測更重要。
粗略想法:
[some_spi_device]
cs_pin: chamber:gpio9
spi_software_sclk_pin: chamber:gpio10
spi_software_mosi_pin: chamber:gpio11
spi_software_miso_pin: chamber:gpio12
這不是特定設備的現成配置,而是說明:所有 SPI 腳位必須在實際連接模組的 MCU 上。
線路長度和干擾¶
SPI 可以很快運行,但不喜歡長的、雜亂的線路。
實務規則:
- 保持
SCK、MOSI、MISO、CS簡短; - 靠近
GND佈線; - 不要與加熱器和馬達線路平行佈線;
- 如果出現錯誤,減少
spi_speed; - 使用適當的連接器;
- 不要無故將 SPI 拉過整個印表機;
- 對於遠端節點,更常選擇 CAN、UART/RS-485 或靠近模組的獨立 MCU。
SCK 線特別敏感:它是時鐘信號。如果它很髒,所有通訊都可能變得不穩定。
SPI 和 RC522¶
RC522 是一個命名混淆的 SPI 模組的好例子。
在許多 RC522 主板上,SDA 腳實際上用作 SPI 的 SS/CS。這不是 I2C SDA。
對於 RC522,你通常需要:
3.3V;GND;SCK;MOSI;MISO;SDA/SS/CS;RST;- 有時
IRQ,但在簡單的專案中通常不使用。
詳細的圖示在實務文章中:連接 RFID 讀卡機。
連接前要檢查的事項¶
在連接 SPI 模組之前,驗證:
- 模組電源;
- 邏輯等級;
- 特定主板的腳位圖;
SCK、MOSI、MISO、CS在哪裡;- 是否需要
RST、DC、IRQ或其他腳位; - 哪個
CS被指派給該設備; - 如果
CS與另一個模組衝突; - 是否需要硬體 SPI 或軟體 SPI;
- 文件建議什麼速度;
- 韌體是否支援此模組。
常見錯誤¶
- 混淆
MOSI和MISO; - 忘記
CS; - 將兩個設備連接到一個
CS; - 未連接共同的
GND; - 對
3.3VSPI 模組施加5V; - 將 RC522 上的
SDA誤認為 I2CSDA; - 選擇了過高的速度;
- 製作了過長的線路;
- 將模組連接到一個 MCU,但指定了另一個的腳位;
- 認為 SPI 是驅動負載的電源介面。
要點¶
SPI 是控制器附近模組的快速介面。通常你需要 SCK、MOSI、MISO、CS、電源和 GND。
與 I2C 的主要區別:SPI 通常沒有位址,每個設備都由單獨的 CS 選擇。連接前,驗證腳位圖、邏輯等級、速度、線路長度和韌體支援。
相關資料¶
- SparkFun: Serial Peripheral Interface - SPI 的實務解說、資料線、新的 PICO/POCI 名稱和基本交換邏輯。
- SparkFun: SPI Chip Select - 為什麼需要
CS以及如何連接多個 SPI 設備。 - Adafruit: SPI Devices - SPI 與 I2C 的比較、單獨的
CS、速度、極性/相位和限制。 - DigiKey: SPI Simplifies Device Communication - 連接多個 SPI 設備的選項和
CS的角色。 - Klipper Configuration Reference: Common SPI settings - Klipper 中的
spi_speed、spi_bus、軟體 SPI 和cs_pin參數。