CAN 介面¶
CAN 是一種讓多個裝置共用差動線路進行通訊的介面。全稱:Controller Area Network。
CAN 源自汽車與工業電子領域,但在 3D 印表機中因工具頭板、遠端 MCU 及需要比 I2C/SPI 更長距離、更可靠通訊的模組而普及。
CAN 的適用場景¶
在印表機及類似 iDryer 的周邊裝置中,CAN 用於:
- 印表機列印頭上的工具頭板;
- 遠端模組中的額外 MCU;
- 減少線束中的導線數量;
- 與 CAN 濾波器、攝影機或乾燥機板的通訊;
- 多控制器的分散式系統;
- USB 或長距離 I2C/SPI 不適用的場合。
當節點距離主機或主板較遠,且周圍有馬達、加熱器及其他干擾源時,CAN 尤其有用。
CANH、CANL 與 GND¶
實體 CAN 匯流排通常使用:
CANH;CANL;- 有時使用
GND或共同參考線; - 若有需要,模組電源獨立供應。
訊號以 CANH 與 CANL 之間的差值傳輸,這也是 CAN 比單一訊號線更能抗干擾的原因。
簡化示意圖:
來源:Wikimedia Commons,EE JRW,CC BY-SA 4.0
{kind=link}
佈線時,CANH/CANL 通常採用雙絞線。GND 的連接方式取決於具體電路、電路板與說明文件,但在小型 DIY 系統中,通常需要共同參考點以確保穩定運作與介面安全。
必須具備 CAN 收發器¶
重要提示:微控制器支援 CAN 與電路板上具備 CAN 功能並非同一回事。
要讓 CAN 正常運作,需要:
- 具有 CAN 控制器或適當韌體支援的微控制器;
- 電路板上的 CAN 收發器;
- 正確的
CANH/CANL接頭; - 收發器電源;
- 終端電阻;
- 為 CAN 編譯的韌體。
若微控制器規格表提及 CAN,但電路板上沒有收發器,則無法直接連接至 CAN 匯流排。
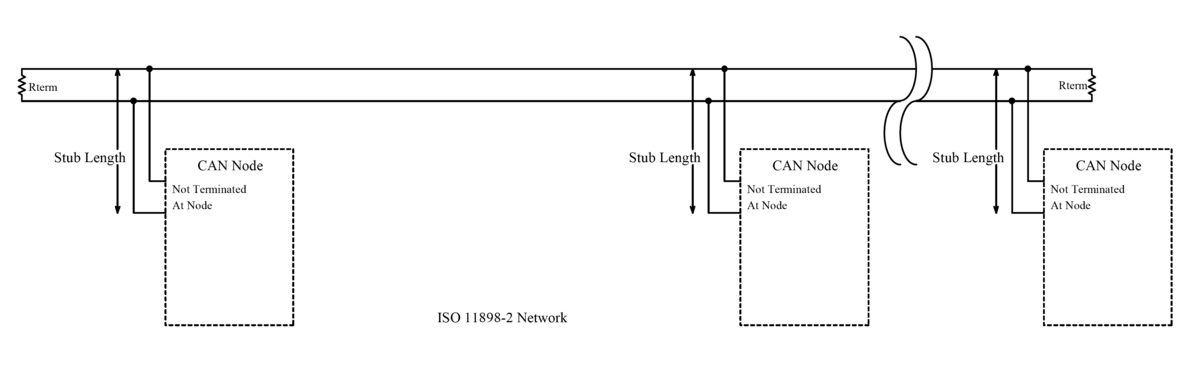
拓撲架構與終端電阻¶
CAN 是一種匯流排。良好的拓撲架構形如一條直線,各節點透過短分支連接。
通常需要兩個 120 Ohm 終端電阻:
- 一個位於匯流排的一端;
- 另一個位於另一端。
不是一個,不是三個,也不是「每塊板子各一個」。確切地說,兩端各一個。
在斷電狀態下,一條正確終接的匯流排,用三用電錶量 CANH 與 CANL 之間,通常會顯示約 60 Ohm,因為兩個 120 Ohm 電阻並聯。
許多電路板設有終端電阻跳線,有些則內建終端電阻且不易停用。因此在組裝前,請檢查匯流排上所有電路板的電路圖。
位元率¶
CAN 速率必須在所有節點上一致。在 Klipper 中,CAN 通常使用 1000000,即 1 Mbit/s,但具體數值取決於韌體、設定及匯流排長度。
若位元率不同,節點將無法正常通訊。
對於較長或有問題的佈線,速率可能至關重要。速率越高,匯流排對拓撲架構、終端電阻及線材品質的要求也越嚴格。
Klipper 中的 CAN¶
在 Klipper 中,CAN 作為與 MCU 通訊的方式之一。
CAN 上的裝置通常不透過 serial: 指定,而是在設定中使用 canbus_uuid:
在 Linux 端,通常需要 can0 介面。主機必須具備 CAN 轉接器:
- USB-CAN 轉接器;
- 處於 USB-to-CAN 橋接模式的電路板;
- SBC 用 HAT/轉接器;
- 其他受支援的電路。
Klipper 提供工具來尋找新未初始化裝置的 canbus_uuid。請注意:若裝置已由 Klipper 設定,它可能不再出現在清單中的「新」裝置列表裡。
USB-to-CAN 橋接¶
部分電路板可以燒錄為 USB-to-CAN 橋接模式。此時電路板透過 USB 連接主機,並在 Linux 中顯示為 CAN 轉接器。
這種方式很方便,但有一個重要限制:橋接模式的用途是與真實 CAN 匯流排及其他 CAN 節點通訊。若主機附近只有一塊板子且沒有真實 CAN 匯流排,通常直接使用一般 USB/串列模式會更簡單。
此外,USB-to-CAN 橋接器不會顯示為 /dev/serial/by-id/...。它被設定為 CAN 介面,使用 canbus_uuid 而非 serial:。
何時適合使用 CAN¶
以下情況值得考慮使用 CAN:
- 需要連接工具頭板;
- 需要透過長線束進行通訊;
- 需要多個遠端 MCU;
- 希望減少移動部件與外殼之間的導線;
- 已有 CAN 基礎設施;
- 所選電路板有完善的 Klipper CAN 說明文件。
以下情況 CAN 可能並非必要:
- 電路板位於主機附近;
- 只需一個額外的 MCU;
- USB 運作穩定;
- 對燒錄、
can0、終端電阻及 Linux 網路設定缺乏經驗; - 所選電路板說明文件不完善。
對於第一個簡單的額外控制器,USB 通常更快速且清晰。當 CAN 真正能解決佈線或板卡分散問題時,才有使用的意義。
CAN 不為負載供電¶
CAN 僅用於通訊。
若 CAN 板控制風扇、加熱器、SSR 或伺服馬達,仍需要:
- 電路板電源;
- 負載電源;
- MOSFET/驅動器/SSR;
- 保險絲;
- 適當的接線端子;
- 加熱器的熱保護;
- 安全的外殼。
CAN 無法取代電力電子元件,也不能讓加熱器變得安全。
購買前的確認事項¶
購買 CAN 板前,請確認:
- 使用的是什麼微控制器;
- 電路板是否支援 Klipper CAN;
- 是否有 CAN 收發器;
CANH和CANL的位置;- 是否有終端電阻及如何啟用;
- 使用的是什麼接頭;
- 電路板如何供電;
- 電路板如何燒錄;
- 是否有
canbus_uuid的操作說明; - 是否需要獨立的 USB-CAN 轉接器;
- 是否有電路圖及引腳分配圖;
- 有哪些可用的引腳與電源輸出。
若賣家僅因晶片理論上支援 CAN 就標示「CAN」,但電路板上沒有收發器也沒有說明文件,這是個不好的選擇。
常見錯誤¶
- 混淆
CANH和CANL; - 忘記需要 CAN 收發器;
- 只裝一個終端電阻而非兩個;
- 在每塊板子上都啟用了終端電阻;
- 未檢查
CANH與CANL之間的電阻; - 各節點設定了不同的位元率;
- 期望從 USB-to-CAN 橋接器找到
/dev/serial/by-id; - 將板子燒錄為 USB 模式,卻以 CAN 方式連接;
- 燒錄為 CAN 模式,卻未設定
can0; - 用長分支組成星型架構而非匯流排;
- 以為 CAN 可以為負載供電。
重點摘要¶
CAN 是遠端 MCU、工具頭板及印表機內分散式系統的理想介面。它使用差動對 CANH/CANL,需要 CAN 收發器、正確的拓撲架構,以及匯流排兩端各一個終端電阻。
對於 Klipper,CAN 雖有用但比 USB 複雜:需要將板子燒錄為 CAN 模式、設定轉接器/can0、尋找 canbus_uuid,並確認實體匯流排。在 CAN 確實能簡化佈線或提升連接可靠性的場合再使用。
相關資料¶
- Klipper: CANBUS - Klipper 官方 CAN 說明文件:硬體、主機轉接器、
can0、canbus_uuid、終端電阻及 USB-to-CAN 橋接。 - Klipper: CANBUS protocol - Klipper 如何指派 CAN 節點 ID 及使用
canbus_uuid。 - CAN Bus Debugger: CAN Bus Termination Explained - 兩個
120 Ohm終端電阻、60 Ohm量測方法及常見錯誤的實用說明。 - DigiKey: CAN Bus explained - CAN 匯流排、差動通訊及其在分散式系統中應用的概觀。
- Texas Instruments: Introduction to CAN - CAN 實體層、收發器及典型網路的基礎說明。