CAN 接口¶
CAN 是一个在公共差分线上进行多个设备通信的接口。展开为:Controller Area Network(控制器局域网)。
CAN 来自汽车和工业电子产品,但在 3D 打印机中,它因用于工具头板、远程 MCU 和需要比 I2C/SPI 更长和更可靠通信的模块而流行。
CAN 的用途¶
在打印机和 iDryer 等外围设备中,CAN 用于:
- 打印机头的工具头板;
- 远程块中的额外 MCU;
- 减少线束中的线数;
- 与 CAN 过滤器、摄像头或干燥机板的通信;
- 多个控制器的分布式系统;
- USB 或长的 I2C/SPI 不方便的情况。
当节点远离主机或主板,附近有电机、加热器和其他噪声源时,CAN 特别有用。
CANH、CANL 和 GND¶
物理 CAN 总线通常使用:
CANH;CANL;- 有时是
GND或公共参考线; - 模块电源分开,如果需要的话。
信号作为 CANH 和 CANL 之间的差值传输。这就是 CAN 处理噪声优于单信号线的原因。
简化的接线图:
来源: Wikimedia Commons, EE JRW, CC BY-SA 4.0
{kind=link}
对于接线,CANH/CANL 通常使用绞合对。GND 取决于具体的电路、板和文档,但在小型 DIY 系统中,通常需要公共参考以获得稳定的操作和接口安全。
需要 CAN 收发器¶
重要提示:微控制器中的 CAN 支持和板上的 CAN 不是同一回事。
要使 CAN 工作,你需要:
- 具有 CAN 控制器或合适固件支持的微控制器;
- 板上的 CAN 收发器;
- 正确的
CANH/CANL连接器; - 收发器电源;
- 终端;
- 为 CAN 构建的固件。
如果微控制器数据表提到 CAN,但板上没有收发器,你无法直接连接到 CAN 总线。
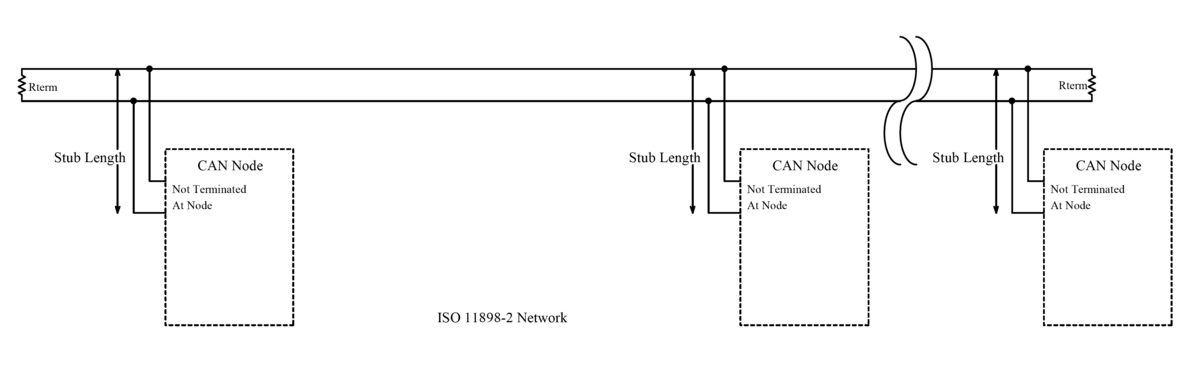
拓扑和终端¶
CAN 是一个总线。良好的拓扑看起来像一条线,节点通过短分支连接。
通常需要两个 120 欧 终端:
- 一个在总线的一个物理端;
- 第二个在另一个物理端。
不是一个,不是三个,也不是"在每个板上"。恰好两个在末尾。
如果电源关闭,在正确终止的总线上,万用表在 CANH 和 CANL 之间通常显示约 60 欧,因为两个 120 欧 电阻并联。
许多板都有终端跳线。有些内置了终端而没有方便的禁用。所以在组装前,检查总线上所有板的原理图。
比特率¶
CAN 速度必须在所有节点上匹配。在 Klipper 中,CAN 通常使用 1000000,即 1 Mbit/s,但具体值取决于固件、设置和总线长度。
如果比特率不同,节点将无法正常通信。
对于长距离或有问题的接线,速度可能很关键。速度越高,对总线拓扑、终端和线质量的要求就越严格。
Klipper 中的 CAN¶
在 Klipper 中,CAN 用于与 MCU 通信。
CAN 上的设备通常不通过 serial: 指定。相反,配置使用 canbus_uuid:
在 Linux 端,你通常需要一个 can0 接口。主机必须有一个 CAN 适配器:
- USB-CAN 适配器;
- USB 转 CAN 网桥模式的板;
- SBC 的 HAT/适配器;
- 其他支持的电路。
Klipper 有一个工具来查找新未初始化设备的 canbus_uuid。重要的是要理解:如果设备已由 Klipper 配置,它可能不再显示在列表中作为"新"。
USB 转 CAN 网桥¶
某些板可以刷入 USB 转 CAN 网桥模式。然后该板通过 USB 连接到主机,并作为 CAN 适配器出现在 Linux 中。
这很方便,但有一个重要的限制:需要网桥模式与真实 CAN 总线和其他 CAN 节点通信。如果你只有一个靠近主机的板,没有真实的 CAN 总线,通常更简单地使用普通 USB/serial 模式。
另外,USB 转 CAN 网桥不会显示为 /dev/serial/by-id/...。它配置为 CAN 接口,使用 canbus_uuid,而不是 serial:。
CAN 何时合理¶
如果以下情况,CAN 值得考虑:
- 你需要连接工具头板;
- 你需要在长的线束上运行通信;
- 你需要多个远程 MCU;
- 你想减少移动部件和机箱之间的线;
- 你已经有 CAN 基础设施;
- 所选板为 Klipper CAN 提供了良好文档。
如果以下情况,CAN 可能不必要:
- 板靠近主机;
- 你只需要一个额外的 MCU;
- USB 工作稳定;
- 你对刷机、
can0、终端和 Linux 网络没有经验; - 所选板文档不充分。
对于第一个简单的附加控制器,USB 通常更快和更清楚。当 CAN 解决真实的接线或板分布问题时,它才有意义。
CAN 不供电负载¶
CAN 仅用于通信。
如果 CAN 板控制风扇、加热器、SSR 或伺服,它仍需要:
- 板电源;
- 负载电源;
- MOSFET/驱动器/SSR;
- 保险丝;
- 适当的端子;
- 加热器的热保护;
- 安全的机箱。
CAN 不能替代功率电子产品,也不能使加热器安全。
购买前的检查清单¶
购买 CAN 板前,验证:
- 使用什么微控制器;
- 板是否支持 Klipper CAN;
- 是否有 CAN 收发器;
CANH和CANL在哪里;- 是否有终端以及如何启用它;
- 使用什么连接器;
- 板如何供电;
- 板如何刷机;
- 是否有
canbus_uuid的说明; - 是否需要单独的 USB-CAN 适配器;
- 是否有原理图和引脚分配;
- 有哪些引脚和电源输出可用。
如果卖家只是因为芯片理论上支持它而写"CAN",但板没有收发器和文档,那就是个差选择。
典型错误¶
- 混淆了
CANH和CANL; - 遗漏了 CAN 收发器是必需的;
- 只放了一个终端而不是两个;
- 在每个板上启用终端;
- 没有检查
CANH和CANL之间的电阻; - 在节点上选择了不同的比特率;
- 期望从 USB 转 CAN 网桥得到
/dev/serial/by-id; - 为 USB 刷入板,但作为 CAN 连接;
- 为 CAN 刷入,但没有配置
can0; - 用长分支做了一个星形而不是总线;
- 认为 CAN 是供电负载的方法。
关键要点¶
CAN 是用于远程 MCU、工具头板和打印机内分布式系统的好接口。它使用差分对 CANH/CANL,需要 CAN 收发器、正确的拓扑和总线末端的两个终端。
对于 Klipper,CAN 很有用但比 USB 复杂:你需要为 CAN 刷入板,配置适配器/can0,查找 canbus_uuid,并验证物理总线。在 CAN 实际简化接线或改进连接鲁棒性的地方使用它。
相关资料¶
- Klipper: CANBUS - 官方 Klipper CAN 文档:硬件、主机适配器、
can0、canbus_uuid、终端和 USB 转 CAN 网桥。 - Klipper: CANBUS protocol - Klipper 如何分配 CAN 节点 id 和使用
canbus_uuid。 - CAN Bus Debugger: CAN Bus Termination Explained - 两个
120 欧终端、60 欧测量和常见错误的实用解释。 - DigiKey: CAN Bus explained - CAN 总线、差分通信和在分布式系统中的应用的一般概述。
- Texas Instruments: Introduction to CAN - CAN 物理层、收发器和典型网络的基本描述。