サーボを接続する¶
サーボは小さなモーター、ギアボックス、および制御電子機器を備えた小さなモーターです。シャフトをどの位置に回転させるかを指示することができます。
iDryerのようなデバイスでは、サーボはダンパーを開く、小さなラッチを移動させ、機械的なスイッチを押すか、気流をリダイレクトすることができます。
サーボの主な間違い。それが「小さなもの」であり、コントローラーの任意の5V ピンから電力を供給できると思う。サーボは特に起動時、急激な動きで、またはメカニズムが結合するときに、かなりの電流を引く可能性があります。
3本のワイヤー¶
典型的なホビーサーボには3本のワイヤーがあります。
- 電源。通常
5Vまたは6V - グラウンド。
GND - シグナル。コントローラーからの制御パルス
一般的な色。
- 赤 - 電力
- 黒または茶色 - グラウンド
- 黄色、オレンジ、または白 - シグナル
しかし、あなたは色を盲目的に信頼することはできません。異なるメーカーは異なるカラースキームを使用する場合があります。接続する前に、マーキング、製品ページ、またはデータシートを確認してください。
電源は別、シグナルは別¶
シグナルワイヤーはサーボに電力を供給しません。サーボがどこに回転するかだけをサーボに伝えます。
サーボはパワーワイヤーからエネルギーを引きます。
正しいロジック。
- コントローラーは制御シグナルのみを提供します
- サーボは、現在のサーボを処理できる5V/6V ソースから電力を供給されます
- コントローラー接地とサーボ電力グラウンドが接続されます
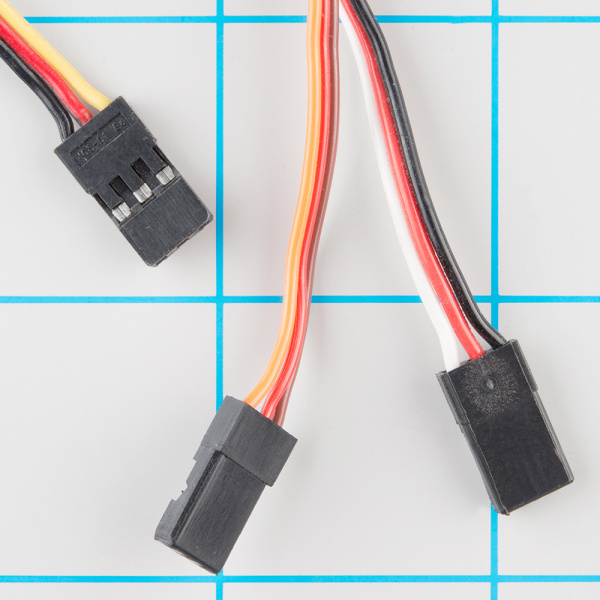
出典: SparkFun Electronics、CC BY-SA 4.0
弱い5Vから電力を供給することはできない理由¶
多くのボードには5V ピンがあります。これはサーボをそれから安全に電力することができることを意味しません。
移動するとき、サーボはそのサイズが示唆する以上に多くの電流を引く可能性があります。電力が不十分な場合、典型的な症状が表示されます。
- コントローラーが再起動します
- 画面がちらつく
- USB接続が削除されます
- サーボはジャークします
- ESP32のWi-Fi下がります
- サーボはハムですが、移動しません
- 電源はムーブメント開始時にドロップします
1つの小さなサーボの場合、ボード電源は、ボードとソースが明確にそのエレクトロニクス冷却に対応している場合は、時々機能します。しかし、実際のデバイスを備えたダンパー、ラッチ、またはメカニズムでは、別の5V/6V DC-DCまたは余裕のある電源を使用する方が良いです。
共通のグラウンド¶
サーボが別々のソースで電力を供給される場合、共通のグラウンドが必要です。
共通のグラウンドなしでは、コントローラーとサーボには共通の信号レベルがありません。サーボは応答しない場合、ジャークできる場合があります。またはランダムに動作します。
シンプルな接続。
- 電源からの
+5Vまたは+6Vはサーボの電源に行きます - 電源からの
GNDはサーボグラウンドに行きます - コントローラーの
GNDは同じグラウンドに接続されます - コントローラーのPWM/GPIOピンはサーボシグナルワイヤーに移動します
サーボ電源とコントローラー電源は異なる場合がありますが、グラウンドは共通である必要があります。
どのシグナルが必要か¶
典型的な位置ホビーサーボはパルスで制御されます。
典型的なシグナル。
- パルスはおおよそ
20 msごと - 約
1 ms- 範囲の1つの極端 - 約
1.5 ms- 中期 - 約
2 ms- 範囲の他の極端
これはLED明るさまたはファン速度のための典型的なPWMではありません。ここで、パルス幅マイクロセコンドは重要です。
実際の特定のサーボの制限は異なる場合があります。一部の安全に0〜180度ではなく、より少ない範囲から動作します。したがって、極端な位置は慎重なテストを必要とします。
サーボをメカニズムに対して詰まらせないでください¶
サーボは指定された位置を保持しようとします。
ダンパーがハウジングにぶつかる場合、腕が結合する場合、またはメカニズムがコマンドの終了前に物理的な停止に到達した場合、サーボは押し続けます。その時点で、現在の上昇、モーターは加熱、ギアボックス摩耗。
これは特にダンパーとラッチに関して重要です。
永続的な操作の前に、確認してください。
- メカニズムは全体の範囲を自由に移動します
- ミスアライメントはありません
- リンケージの結合はありません
- サーボは終了位置でハムしない
- ファームウェアの極端な角度は、メカニズムを停止に強制しない
- 電源がオフになると、デバイスは安全に留まるか、意図したとおりにスプリングを返します
サーボが休止状態でハムしている場合、それはしばしば負荷、停止、または誤ったレバジオメトリーを示します。
起動電流と失速電流¶
サーボは通常の動作電流と、シャフトがブロックされている場合の電流を持ちます。後者はしばしば失速電流と呼ばれます。
失速電流は、サーボが移動しようとするが、シャフトがブロックされている場合、またはメカニズムが重すぎる場合に表示されます。
このモードはしばしば原因です。
- 電源ドロップ
- コントローラーの再起動
- ワイヤー加熱
- DC-DC過熱
- ギアボックスの破損
データシートが失速電流をリストアップ場合は、この값と安全余裕を考慮して電源を選択します。データシートがない場合は、サーボが「視力」で実行する安全であると想定することはできません。
コンデンサーがサーボの隣に¶
時々、+5V と GND の間の電解コンデンサーはサーボの隣に役に立ちます。
それは適切な電源を置き換えるものではありませんが、動きの開始時の短いドロップをスムーズにすることができます。
小さなサーボの場合。数百マイクロファラッド、470 uF など以上、供給電圧を超える電圧定格を使用。
電解コンデンサーの極性は重要です。
- コンデンサープラスを
+5V - コンデンサーマイナスを
GND
デバイスが信頼性が必要な場合は、まず適切な電源と配線を選択し、その後コンデンサーを追加の測定として使用します。
例Klipperコンフィギュレーション¶
Klipperでは、サーボは [servo] セクションで説明されています。
例。
[servo chamber_damper]
pin: PA8
maximum_servo_angle: 180
minimum_pulse_width: 0.001
maximum_pulse_width: 0.002
initial_angle: 90
コマンド。
SET_SERVO SERVO=chamber_damper ANGLE=0
SET_SERVO SERVO=chamber_damper ANGLE=90
SET_SERVO SERVO=chamber_damper ANGLE=180
ピン名はここで典型的です。実際のデバイスでは、ボードのピンアウトを確認してください。
メカニクス場合は、すぐに 0 および 180 で始めないでください。最初に 60、90、120 のような安全な範囲をテストし、角度を拡張します。
例Arduino/ESP32ロジック¶
Arduinoアプローチは通常、サーボライブラリを使用します。
#include <Servo.h>
Servo damper;
void setup() {
damper.attach(9);
damper.write(90);
}
void loop() {
}
これはシグナルロジックの一例です。サーボ電源は別々に設計される必要があります。シグナルワイヤーがArduinoまたはESP32に接続されている場合でも、サーボモーターはコントローラー電源をオーバーロードしてはいけません。
接続した後に確認すること¶
ハウジングにマウントする前に。
- サーボは正しい電圧を受け取ります
- 電源はサーボ電流を処理できます
- コントローラー接地とサーボ接地は共通です
- シグナルワイヤーは正しいピンに接続されます
- サーボは正しい方向に移動します
- 極端な角度はメカニズムを破りません
- メカニズムは結合しません
- サーボは継続的にハムしません
- ワイヤーはレバーまたはギアに引っかかりません
- 動きの後、電源はドロップしません
- コントローラーは再起動しません
アンロードされたメカニクスと実際の負荷でテストしてください。移動が手で簡単なダンパーは、ハウジングに取り付けた後にバインドすることができます。
一般的な間違い¶
- GPIOからサーボに電力を供給
- 弱い5V ボードピンからサーボに電力を供給
- 共通のグラウンドを忘れた
- ワイヤーの色をチェックなしで信じている
- 電源を逆に接続
- ワイヤーが薄すぎを使用する
- 起動と失速電流を考慮していない
- サーボを機械的な停止に対して押すことを強制
- メカニズムが安全に実行する場合のみ、角度
0または180を使用 - ヒーターの近くにサーボをマウントして、動作温度をチェック
- 連続回転サーボを通常の位置セルボとして扱う
キーポイント¶
- サーボには3本の線があります。電力、グラウンド、シグナル
- シグナルはサーボに電力を供給しません
- 実際のデバイスはしばしば別の5V/6V電源が必要です
- サーボグラウンドとコントローラー接地は共通である必要があります
- 最も危険な負荷は詰まりまたは機械的な結合です
- 極端な角度を注意深く選択する必要があり、すぐに
0と180ではありません - コントローラーがサーボを移動するとき再起動する場合、まず電源と共通のグラウンドを確認してください
関連読書¶
- Klipper Configuration Reference: Servo - 公式
[servo]セクション、SET_SERVO、角度、およびパルス幅 - SparkFun: Hobby Servo Tutorial - ホビーサーボ、3本のワイヤー、パルス制御の基本的な説明
- SparkFun: Servo Trigger Hookup Guide - 電気接続、典型的なワイヤーの色、およびホビーサーボメカニクスの故障
- Adafruit: Arduino Lesson 14. Servo Motors - 接続、電源ドロップ動作、およびサーボの隣のコンデンサーの実践的な例
- Arduino Servo Library Reference - Arduino アプローチの公式サーボライブラリ