ロードセルの接続¶
ロードセルは、金属ビーム、ボタン、またはプラットフォームの小さな変形を通じて力または重量を測定します。
iDryerのようなデバイスでは、ロードセルはスプール重量、残りのフィラメント、またはメカニズム負荷を推定することができます。
主なポイント。ロードセルはコントローラーに直接接続されることはありません。そのシグナルは小さすぎます。通常、HX711モジュールまたは類似の増幅器/ADCがセンサーとコントローラーの間に配置されます。
必要なもの¶
最小限のセット。
- 必要な重量範囲のロードセル
- HX711モジュール
- コントローラー。Arduino、ESP32、RP2040、STM32、または別のボード
- 厳密な機械的マウント
- キャリブレーション用の既知のマス
- 短く、きれいなワイヤー
メカニクスが悪い場合、回路は助けになりません。ロードセルはきちんと配線されることができますが、ミスアライメント、遊び、または誤った点で印加された負荷によって無意味な読み取りを与えます。
接続の方法¶
ロードセルはアナログワイヤーでHX711に接続します。
HX711はデジタルワイヤーでコントローラーに接続されます。
典型的なチェーン。
HX711は通常、2つの側面を持っています。
- ロードセルからの入力。
E+、E-、A+、A-など - コントローラーへの接続。
VCC、GND、DT/DOUT、SCK/CLK
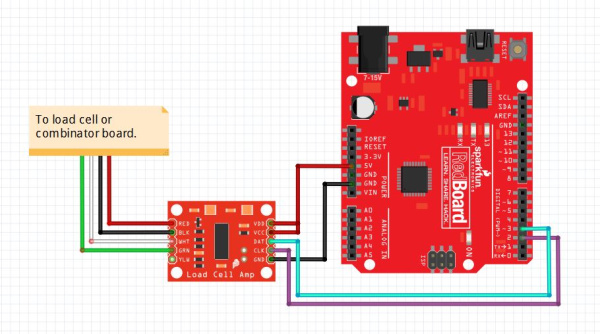
出典: SparkFun Electronics、CC BY-SA 4.0
ロードセルワイヤー¶
一般的な4線式ロードセルには通常以下があります。
E+- ブリッジ供給プラスE-- ブリッジ供給マイナスS+、A+、またはO+- ポジティブ測定信号S-、A-、またはO-- ネガティブ測定信号
一般的なカラースキーム。
- 赤 -
E+ - 黒 -
E- - 緑または青 -
A+ - 白 -
A-
しかし、色は法律ではありません。異なるセンサーが異なるかもしれません。特定のロードセルのデータシートがある場合は、それに従ってください。
センサーに5番目のワイヤー、ホイル、またはシールドがある場合、それは通常電磁シールドです。測定ブリッジワイヤーと混同しないでください。通常、ドキュメンテーションが言う場合、シールドは GND またはハウジングの一方の側に接続されますが、測定 A+/A- には接続されません。
ワイヤーダイアグラムがない場合は、ロードセルを「ランダムに」接続しないでください。まず、センサーのデータシートを見つけるか、メーカー-guidlineごとにブリッジをリングアウトしてください。不正なワイヤーは簡単に不安定な読み取りまたはHX711入力をオーバーロード付与します。
HX711をコントローラーに接続する¶
コントローラー側では、通常、4本のラインが必要です。
VCC- モジュール電源GND- 共通ネガティブDT、DOUT、またはDATA- データSCK、CLK、またはPD_SCK- クロック
多くのHX711モジュールの場合、電源は 3.3V または 5V ですが、特定のモジュールを確認します。コントローラーが3.3Vで実行する場合は、モジュールと電源が3.3Vロジックに対応している方が便利です。
ピン DT と SCK は通常、通常のGPIOに接続できます。これは通常の意味でのI2CまたはSPIではなく、シンプルな2ワイヤーHX711インターフェースです。
メカニクスは回路より重要です¶
ロードセルは製造業者が意図したとおりに変形する必要があります。
ビームセンサーの場合、通常、1つの側面が固定ベースにマウントされ、もう一方の側面が負荷を負担します。両側が1つの部品に厳密にマウントされている場合、センサーは正常に曲がりません。
確認してください。
- センサーのマウント側はどこですか
- 負荷はどこに適用される必要があります
- どの方向に力が行く必要があります
- スペーサーが必要ですか
- 移動する部品はハウジングをクリアしますか
- ミスアライメントはありません
- サイド負荷はありません
- ねじは締めすぎられていません
- スプールまたはプラットフォームはセンサーの動作ゾーンを超えて着陸しません
スプール重量の場合、特に全負荷がセンサーを通じて行くことが特に重要です。ハウジング壁、軸、ケーブル、または化粧品カバーを通じては一部ではありません。
センサーをオーバーロード しないでください¶
ロードセルの範囲は推奨ではなく、測定制限です。
スプールと保有者が超える可能性があるこの場所に1kg センサーが配置される場合、センサーは貧弱に機能するか、永久に変形します。
余裕を持って範囲を選択してください。
- 最大スプール重量
- ホルダー重量
- 可能なジャーク
- ミスアライメント
- ユーザーエラーの安全マージン
しかし、範囲が大きすぎるのも常に良いわけではありません。100kgセンサーは、同一のメカニクスとエレクトロニクスを持つ5kgまたは10kgセンサーよりも小さなスプールを感じます。
最初の起動¶
デバイスにインストールする前に、ベンチでシステムをテストしてください。
- ロードセルをHX711に接続します。
- HX711をコントローラーに接続します。
- テストコードまたはライブラリを実行します。
- センサーを押すと、生の値が変わることを確認します。
- 負荷を削除して、値がかなり安定していることを確認します。
- 既知の塊を配置して、変更を確認します。
この段階では、グラム精度を要求しないでください。まず、センサーが生きていることを確認する必要があります。負荷方向は正しい、読み取りは予測可能に変わります。
重量が増加するとき値が低下する場合は、通常、A+ と A- を交換するか、コード内の符号を考慮してください。
タレと キャリブレーション¶
キャリブレーションのないロードセルはグラムが何であるかわかりません。
典型的なプロセス。
- 空のプラットフォームを配置します。
- タレ。これはプラットフォーム重量を考慮したゼロです。
- 既知の塊を配置します。
- キャリブレーション係数を選択します。
- 複数の異なる重みをチェックします。
フィラメントスプールの場合、体重としてカウントされるものを決定してください。
- プラスチック全体のスプール
- 空のスプール重量なしで、残りのプラスチックのみ
- 初期値からの重量変更
異なるメーカーの空のスプールがさまざまに体重される場合、正確な残りの計算には、特定の空のスプール重量を知るか、粗い推定で動作する必要があります。
ノイズと不安定な読み取り¶
HX711は非常に小さなシグナルを測定するため、システムはノイズと機械的問題に敏感です。
不安定な読み取りの原因。
- センサーからHX711への長いワイヤー
- 貧しい連絡先
- ヒーター電源ワイヤーは信号ワイヤーの隣にあります
- ファンまたはプリンター振動
- ソフトベース
- マウント内の遊び
- 温度ドリフト
- 負荷はセンサーをバイパスするハウジングに接触します
実用的な測定。
- HX711をロードセルに接続したままにする
- ヒーター電源ワイヤーに沿ってシグナルワイヤーを実行しない
- センサーを引かないようにワイヤーをセキュリティします
- 測定平均を使用します
- ハウジングにマウントした後、キャリブレートします
- 温度が読み取りに著しく影響する場合、デバイスのウォームアップ後にタレ
アセンブリ後に確認すること¶
使用前に。
- センサーは必要な重量に対応しています
- 負荷はセンサーの動作部分を通じて行きます
- ファスナーは変形をブロックしません
- HX711は正しい電源を受け取ります
DTとSCKは正しいGPIOに接続されます- 共通のグラウンドが存在します
- 生の値は負荷時に変わります
- 負荷なしで、読み取りは速くドリフトしません
- 既知の塊はキャリブレーション後に予想される重量を示します
- ワイヤーはプラットフォームを引かない
- スプールまたはホルダーはセンサーを過ぎてハウジングに接触しません
一般的な間違い¶
- ロードセルをコントローラーアナログ入力に直接接続
E+/E-とA+/A-を混同する- データシートなしでワイヤーカラーを信頼する
- キャリブレーションを忘れる
- 最終機械的インストール前にタレ
- センサーが曲がることができないようにマウント
- センサーをオーバーロード
- 範囲が大きすぎを選択して感度を失う
- 長いワイヤーと干渉から不安定性を取得
- 柔軟なプラスチック本体なしで剛性メカニクスでグラム精度を期待する
キーポイント¶
- ロードセルは通常、コントローラーに直接ではなくHX711を通じて接続されます
- センサーワイヤーは
E+、E-、A+、A-に移動します - HX711は電源、グラウンド、
DT、SCKを介してコントローラーに接続されます - メカニクスは回路より重要です。負荷はセンサーを正しく通じて行く必要があります
- タレとキャリブレーションは既知の塊で必要です
- 厳密なマウント適切なメカニクスなしに、正確な読み取りは起こりません
関連読書¶
- SparkFun: Load Cell Amplifier HX711 Breakout Hookup Guide - 実践的なHX711とロードセル接続、ワイヤーカラー、
DT/SCK、キャリブレーション例 - SparkFun: Load Cell Amplifier HX711 product page - HX711モジュールの説明、目的、およびマイクロコントローラーインターフェース
- DigiKey: HX711 Datasheet by Avia Semiconductor - HX711技術データシート。24ビットADC、差分ブリッジ入力、ゲイン、デジタルインターフェース
- Phidgets: Load Cell Guide - ロードセル機械的インストールと負荷アプリケーション方向の実践的な例
- SparkFun retired HX711 guide: load cell mechanical setup - ビーム、ボタン、およびプラットフォームセンサーマウントオプションの有用な図